所谓机器人的轴能够用专业的名词自由度来解说,假如机器人具有三个自由度,那么它能够沿x,y,z轴自由的运动,但是它却不能倾斜或者转动。当机器人的轴数增加,对工业机器人而言,便是更高的灵活性。

机器人本体轴可分为运动轴和基座轴,以六轴关节机器人的机械结构,六个伺服电机直接经过减速器、同步带轮等驱动六个关节轴的旋转。
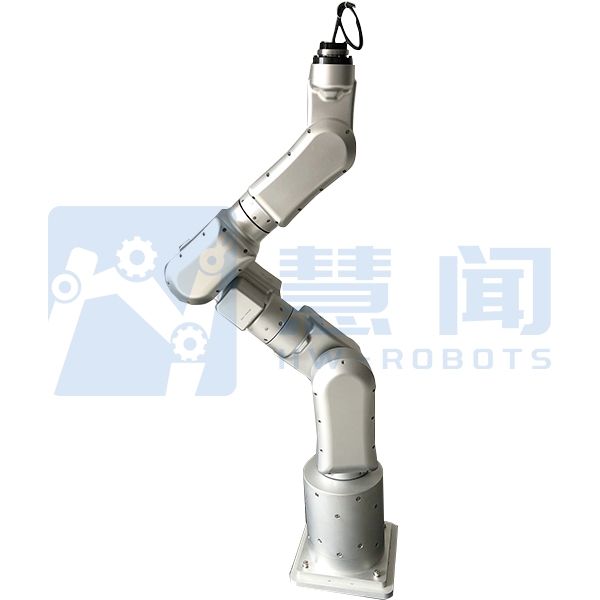
六轴关节机器人本体轴首要便是指:1、本体回转轴;2、下臂前后摇摆轴;3、上臂上下摇摆轴;4、下臂回转轴;5、上臂回转轴;6、手腕上下摇摆轴;1、手腕回转轴。其中本体回转轴是归于基座轴,一般六轴关节机器人本体不包括基座轴。
六轴关节机器人的机械结构,六个伺服电机直接经过减速器、同步带轮等驱动六个关节轴的旋转。六轴工业机器人一般有6个自由度,常见的六轴工业机器人包括旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摇摆(B轴)和手腕回转(T轴)。6个关节组成实现结尾的6自由度动作。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号