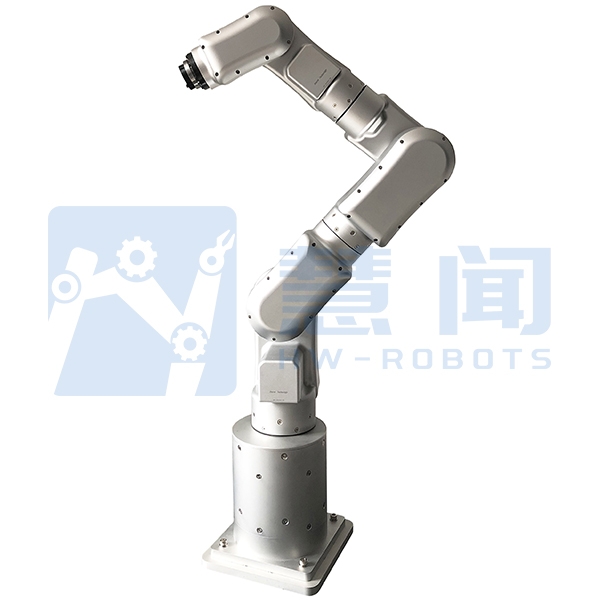
机器人模块化关节技术是一种革命性的结构和制造方式,它通过将机器人关节模组模块化,实现了机器人关节的标准化和可定制化,从而提高了机器人的灵活性和J确性。这种技术的优势和局限性如下:
优势:
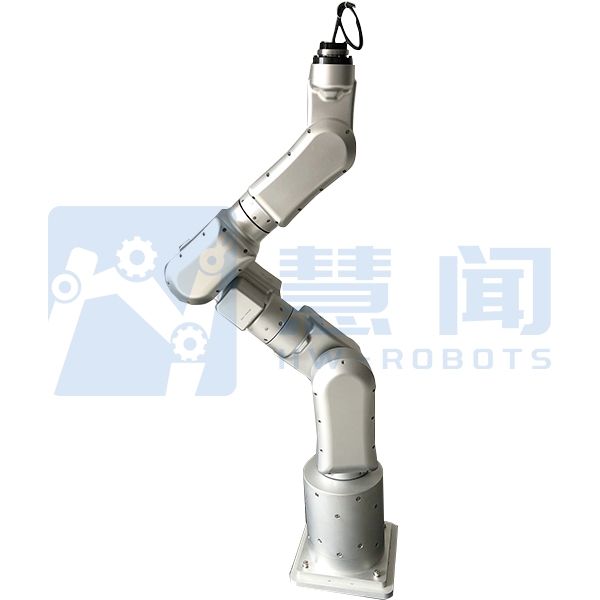
1. 灵活性:模块化关节技术可以根据不同的应用场景和需求,灵活地组合和定制关节模组,从而实现机器人的快速响应和灵活运动。
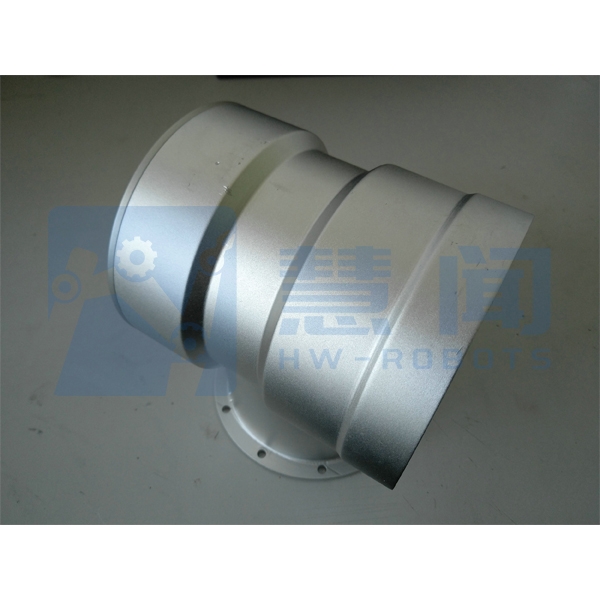
2. J确性:模块化关节技术采用标准化机械接口与电气接口,性能稳定,有利于规模化生产,从而提高了机器人的J确性和稳定性。
3. 可定制化:模块化关节技术可以根据不同的应用需求,定制不同的关节模组,从而满足不同的应用场景和需求。
4. 降低成本:模块化关节技术可以通过规模化生产和标准化设计,降低生产成本,提高生产效率。
5. 易于维护:模块化关节技术采用标准化设计和模块化结构,易于维护和修理,从而降低了维护成本。

局限性:
1. 技术难度:模块化关节技术需要高精度的制造和装配技术,以及高质量的材料和零部件,因此技术难度较高。
2. 成本较高:模块化关节技术需要高精度的制造和装配设备,以及高质量的材料和零部件,因此成本较高。
3. 灵活性有限:虽然模块化关节技术可以根据不同的应用需求,灵活地组合和定制关节模组,但在某些特殊应用场景下,可能需要更高的灵活性和定制化能力。
4. 可靠性问题:模块化关节技术需要高质量的材料和零部件,以及高精度的制造和装配技术,因此在可靠性方面可能存在一定的问题。
综上所述,机器人模块化关节技术具有灵活性、J确性、可定制化、降低成本、易于维护等优势,但也存在技术难度高、成本较高、灵活性有限、可靠性问题等局限性。因此,在应用机器人模块化关节技术时,需要根据具体的应用场景和需求,综合考虑其优势和局限性,以实现Z佳的应用效果。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号