协作机器人主要是指三轴、四轴、五轴、六轴甚至七轴的协作机器人,每个机器人都因其使用方式和应用领域的不同而不同。那让我们来看看六轴机器人的六个轴都有什么作用?
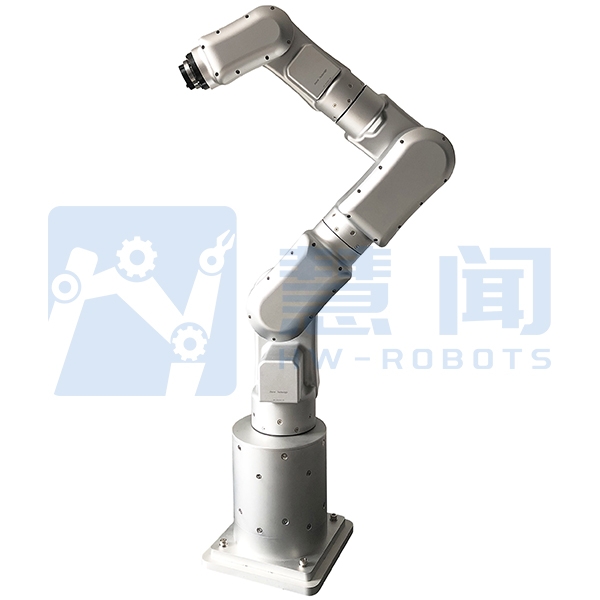
例如深圳慧闻智能有限公司自主研发生产的六轴协作机器人,看看这款六轴机器人,每个轴都是一个关节模块来驱动,每个轴的运动方式和方向都是不同的,每个轴关节实际上是模拟人手的各个关节的运动。
智能六轴协作机器人六轴示意图
一轴为基座:一轴连接底座的部分,主要承载上面轴的重量和基座的左右旋转,左转和右转是通过关节内置的电机和减速器来传动的,每个轴代替一个运动方向,一轴的运动范围可以达到±360°。
二轴为肩部:二轴控制机器人主臂前后摆动和整个手臂上下运动的功能。
三轴为肘部:三轴也是控制机器人前后摆动的功能,但第三轴的摆动臂范围小于第二轴。
四轴为腕部:四轴是控制微调上下翻转动作,旋转的运动范围至大可达±180°。
五轴为腕部:五轴控制微调左右旋转动作,旋转的运动范围至大可达±180°。
六轴为腕部:六轴是末端关节部分,负责末端夹具工作,旋转的运动范围可达±360°。
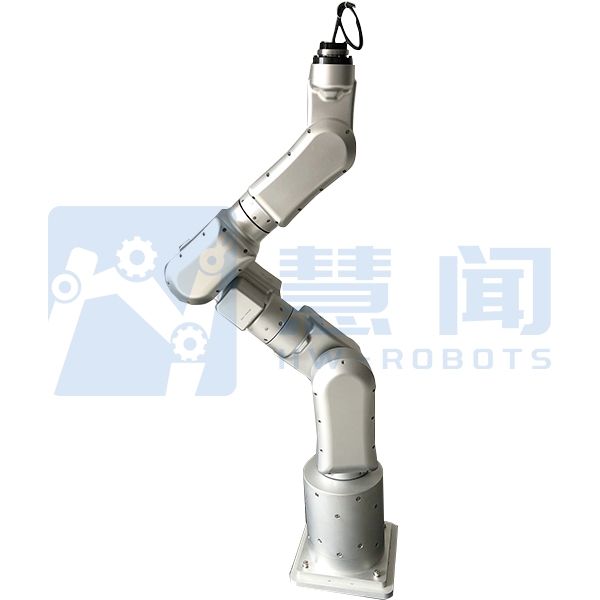
以下是慧闻智能六轴协作机器人模块各关节轴的图片和及应用实例。


多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号