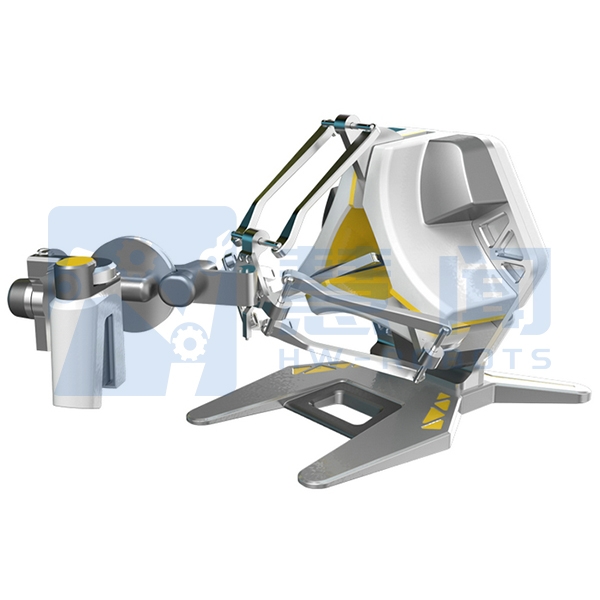
工业机器人本体就是机器人的机械部分,又名操作机,是工业机器人的操作组织,是指工业机器人的原样和本身。工业机器人是典型的机电一体化产品,一般由机械本体、操控体系、传感器、驱动器和输入/输出体系接口等五部分构成。工业机器人本体机械结构由五部分构成:1、传动部件;2、机身及行走组织;3、臂部;4、腕部;5、手部。

工业机器人本体由以下五大部分构成
1、工业机器人本体:机器人的机械本体组织基本上分为两大类,一类是操作本体组织,它相似人的手臂和手腕,另一类为移动型本体结构,主要实现移动功用,松健机器人。
2、驱动伺服单元:伺服单元的作用是使驱动单元驱动关节并带动负载按预定的轨道运动。已广泛选用的驱动方式有:液压伺服驱动、电机伺服驱动,气动伺服驱动,市场上干流的伺服电机厂家有安川、三菱、松下等。
3、数控体系:各关节伺服驱动的指令值由主核算机核算后,在各采样周期给出。机器人通常选用主核算机与关节驱动伺服核算机两级核算机操控,核算机操控体系包含电机驱动软件和轨道操控软件。
4、传感体系:除了关节伺服驱动体系的方位传感器(称作内部传感器)外,还需要调配视觉、力觉、触觉、挨近等多种类型的传感器(称作外部传感器)。
5、输出/输入体系接口:为了与周边体系及相应操作进行联机与应答,会敞开各种通信接口和人机通信装置。
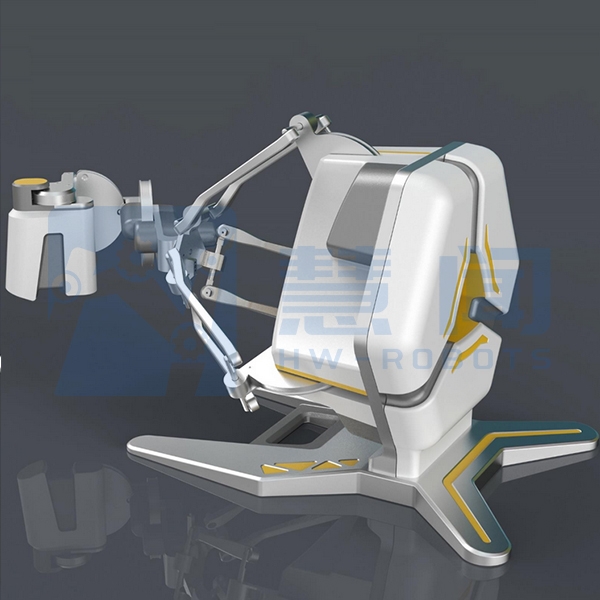
工业机器人本体的结构特色有:
1、工业机器人本体能够简化成各连接杆首尾相连、末端敞开的一个开式运动链,机器人本体的结构刚度差,并随空间方位的改变而改变;
2、机器人本体的每个连杆都具有独立的驱动器,连杆的运动各自独立,运动更为灵活;一般连杆组织有1-2个原动件,各连杆间的运动是相互束缚的,松健机器人;
3、连杆驱动扭矩改变复杂,和执行件方位相关。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号