了解工业机器人的机械结构方法,然后我们能够根据机器人的操作方针和操作要求灵敏地选用合适的机械结构方法。 组织规划需要考虑以下内容:确认机器人各部分(机身、臂部、腕部、手部、行走组织等) 的组织运动方法和参数目标(运动范围、自在 度等)、树立机器人坐标系和关节坐标系、传动组织规划和驱动元件初步选型等。慧闻智能下面与大家具体分享一下。

一、工业机器人本体根本结构
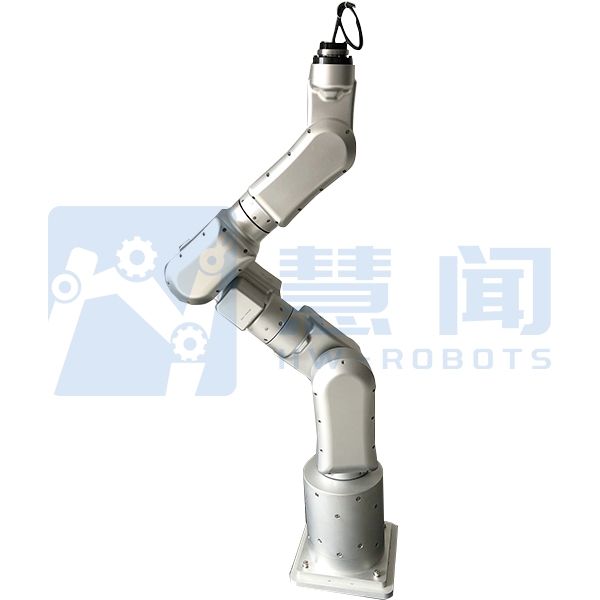
机器人本体根本结构包含:传动部件、机身及行走组织、臂部、腕部和手部。机器人本体根本结构的主要有以下特点:
1、开式运动链:结构刚度不高:
2、相对机架:独立驱动器,运动灵敏;
3、扭矩变化非常复杂:对刚度、间隙和运动精度都有较高的要求;
4、动力学参数(力、刚度、动态性能)都是随位姿的变化而变化:易发生振动或出现其他不安稳现象。
二、机器人本体根本结构要求:
1、自重小:改善机器人操作的动态性能;
2、静动态刚度高:提高定位精度和跟踪精度;增加机械系统规划的灵敏性;减小定位时的超调量安稳时刻,降低对控制系统的要求和系统造价;
3、固有频率高:避开机器人的作业频率,有利于系统的安稳。机器人开发
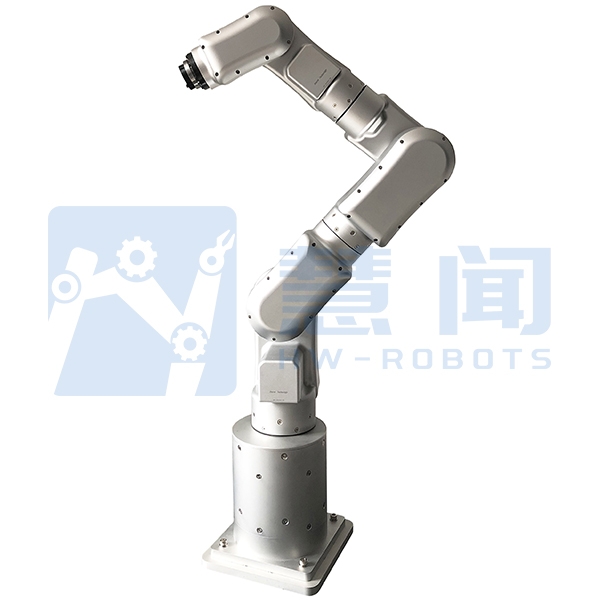
三、工业机器人本体机身典型结构
机身结构一般由机器人总体规划确认。
1、反转与升降机身
a、油缸驱动,升降油缸鄙人,反转油缸在上。升降活塞杆的尺寸要加大。
b、油缸驱动,反转油缸鄙人,升降油缸在上,反转油缸的驱动力矩要规划得大一些。
c、链轮传动组织,反转视点可大于360°
2、反转与仰俯机身。
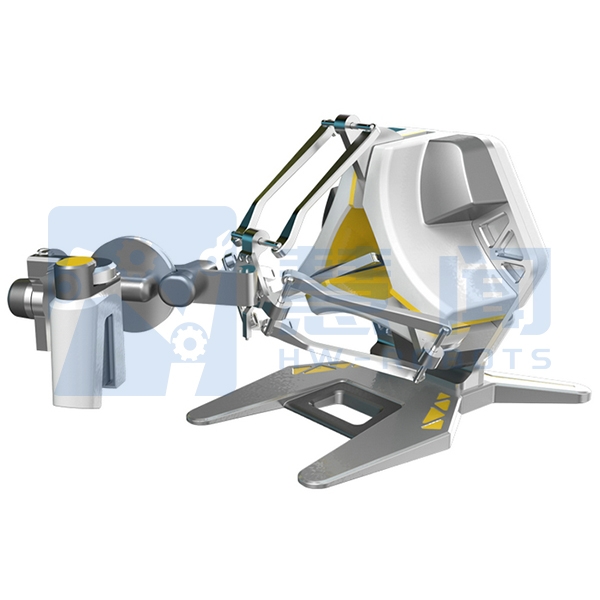
四、协作机器人本体机身规划要注意的问题
1、刚度和强度大,安稳性能好;
2、驱动灵敏,导套不宜过短,避免卡死;
3、驱动方法适合;
4、结构布置合理。

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:135-1019-1727
电话:0755-85275462

微信公众号

微信号