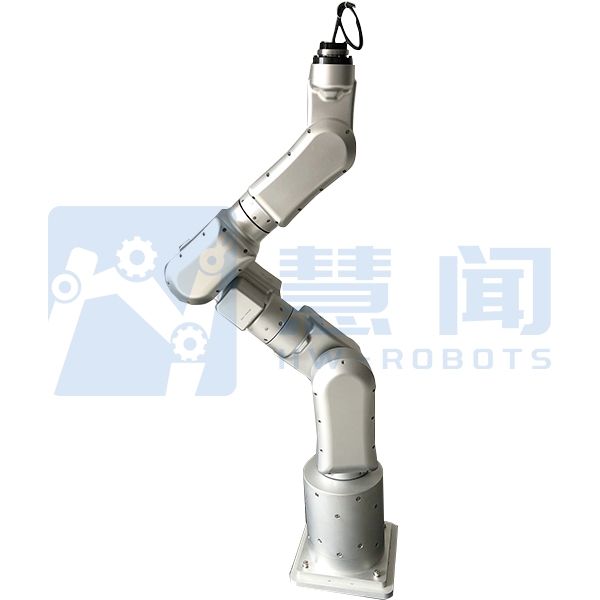
工业机器人的技术参数反映了机器人可担任的作业、具有的很高操作功能等状况,是设计、使用机器人必须考虑的问题。机器人的首要技术参数有自在度、分辨率、作业空间、作业速度、作业载荷等。工业机器人厂家慧闻智能配备为大家下面来分享一下。

一、工业机器人自在度
1、工业机器人具有的独立坐标轴运动的数目。
2、工业机器人的自在度是指确认机器人手部在空间的方位和姿态时所需要的独立运动参数的数目。
3、工业机器人手指的开、合,以及手指关节的自在度一般不包括在内。
4、工业机器人的自在度数一般等于关节数目。
5、工业机器人常用的自在度数一般不超越5~6个。
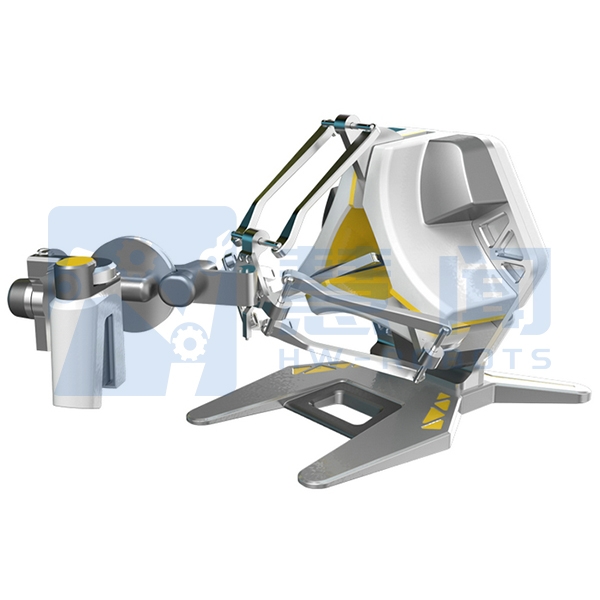
二、工业机器人关节(Joint):
工业机器人关节即运动副,答应机器人手臂各零件之间发生相对运动的组织。
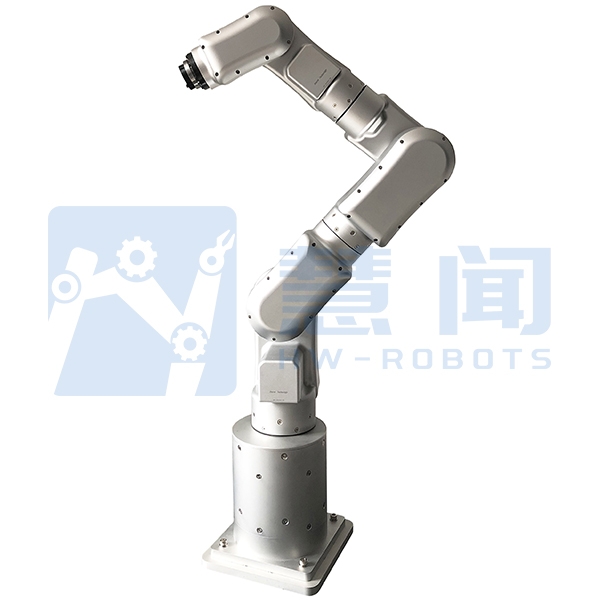
三、工业机器人作业空间
机器人手臂或手部安点缀所能达到的一切空间区域。
其形状取决于机器人的自在度数和各运动关节的类型与配置。
机器人的作业空间通常用图解法和解析法两种方法进行表明。
四、工业机器人作业速度
机器人在作业载荷条件下、匀速运动过程中,机械接口中心或东西中心点在单位时间内所移动的间隔或滚动的视点。
五、工业机器人作业载荷
作业载荷指机器人在作业范围内任何方位上所能承受的z大负载,一般用质量、力矩、惯性矩表明。
还和运转速度和加速度巨细方向有关,一般规定高速运转时所能抓取的工件分量作为承载能力方针。
六、工业机器人分辨率
能够实现的最小移动间隔或最小滚动视点
七、工业机器人精度
重复性或重复定位精度:指机器人重复抵达某一方针方位的差异程度。或在相同的方位指令下,机器人接连重复若干次其方位的涣散状况。它是衡量一列误差值的密布程度,即重复度。机器人开发

多渠道服务支持

多年经验工程师对接

企业选择应用

可签署保密协议
深圳慧闻智能有限公司
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼
手机:175-0755-2151
电话:0755-85275462

微信公众号

微信号